
Phase 1 - Assemblage des pièces
Phase 1 - Assemblage des pièces
Objectifs pédagogiques
- Découverte de la mécanique et de la robotique : Initier les élèves à la construction d’un système mécanique articulé.
- Travail en équipe : Encourager la collaboration entre les élèves pour atteindre un objectif commun en temps limité.
- Précision et méthode : Apprendre à assembler un objet technique en suivant des étapes précises, avec soin et rigueur.
- Pratique des compétences manuelles et techniques : Familiariser les élèves avec l’utilisation d’outils de montage et la lecture d’un schéma d’assemblage.
Compétences techniques visées
- Assemblage mécanique : Être capable d'assembler les pièces du bras robot (structure, axes, moteurs, etc.) de manière précise et dans un ordre logique.
- Utilisation d’outils : Apprendre à manier correctement les outils nécessaires (tournevis, clé Allen, etc.).
- Lecture d’un schéma technique : Savoir interpréter un plan d'assemblage et identifier les différentes pièces et leur emplacement.
- Montage des éléments motorisés : Installer correctement les moteurs et éléments mécaniques du bras robot.
Savoir être (compétences comportementales)
- Travail en équipe : Répartir les tâches de manière équitable et efficace au sein du groupe.
- Rigueur et précision : Être attentif aux détails lors de l’assemblage pour éviter les erreurs.
- Gestion du temps : Apprendre à respecter le temps imparti pour finaliser le projet.
- Adaptabilité : Savoir réagir en cas de difficulté ou de problème technique, et adapter sa méthode de travail.
Compétences transversales
- Collaboration et communication : Travailler efficacement en groupe, en partageant les responsabilités et en communiquant clairement.
- Organisation : Organiser les étapes de l'assemblage de manière logique et structurée.
- Résolution de problèmes : Trouver des solutions rapidement en cas de dysfonctionnements ou de blocages lors de l'assemblage.
- Apprentissage pratique : Développer des compétences en manipulant des objets techniques et en résolvant des problèmes concrets.
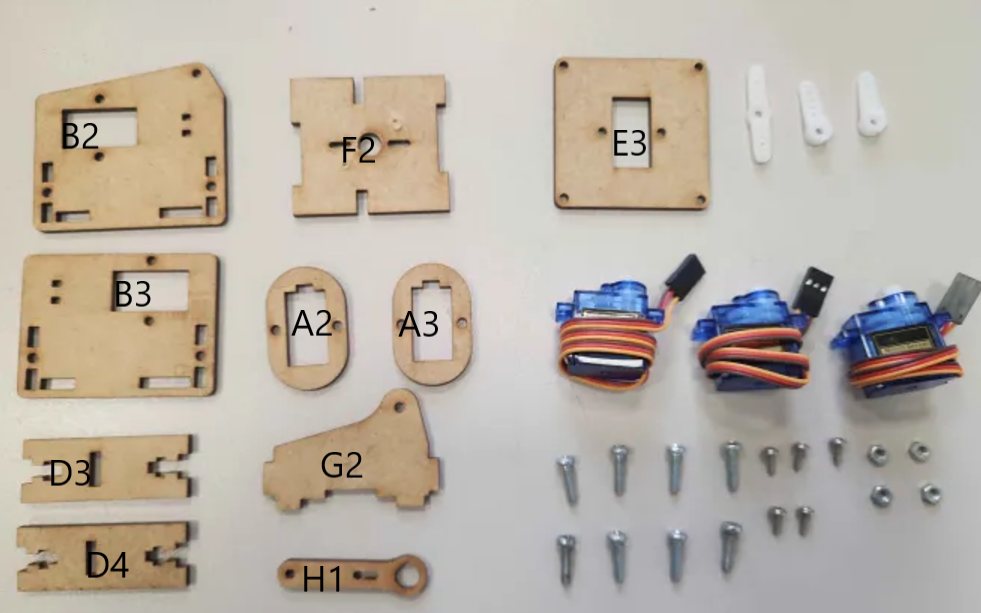
Montage du bras robotique :
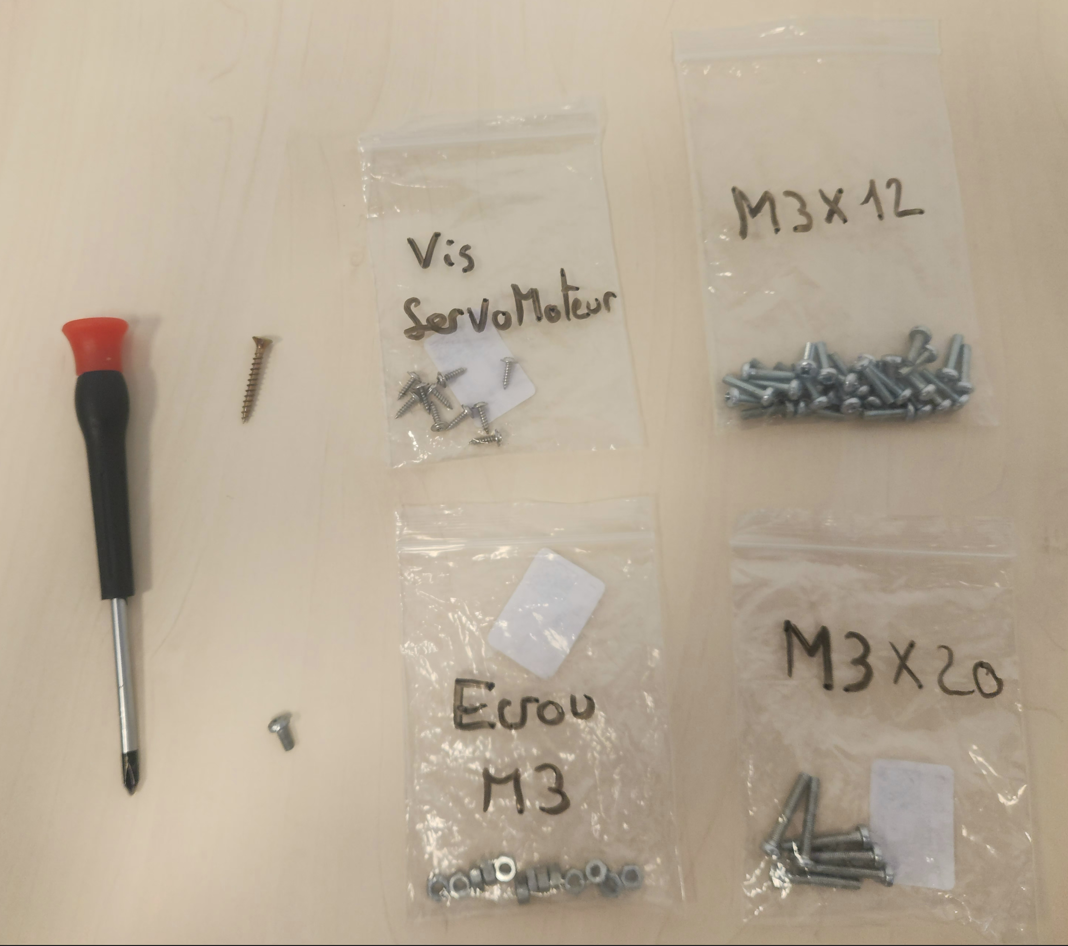
Matériel Nécessaire :
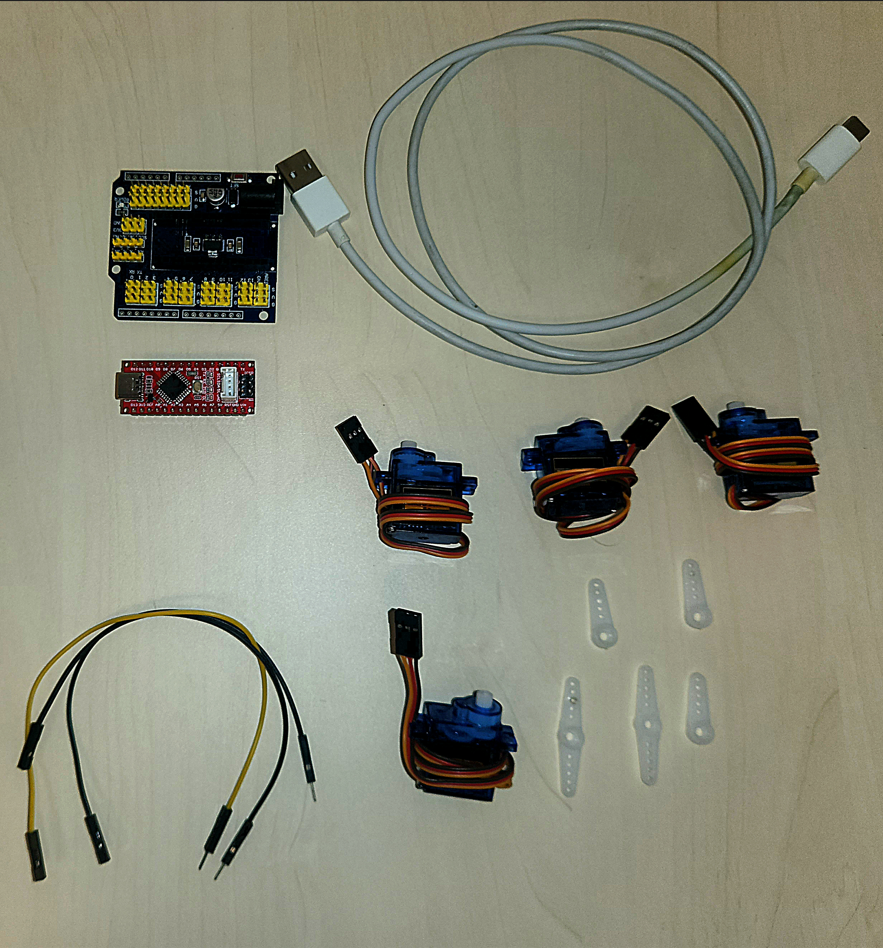
Tournevis : 1 Arduino Nano : 1
Grand Vis : 1 Shield : 1
M3*6 : 1 Câbles Mâle Femelle : 3
Vis Servomoteur : 10 Servomoteur : 4
M3*12 : 29 Hélice Servomoteur : 2
M3*20 : 6 Demi Hélice Servomoteur : 3
Ecrou M3 : 13 Câble USB-A vers USB-C : 1
Montage de la Pince :
Matériel :
M3*12 : 7
M3*6 : 1
Vis servomoteur : 2
Servomoteur : 1
Demi Hélice Servomoteur : 1
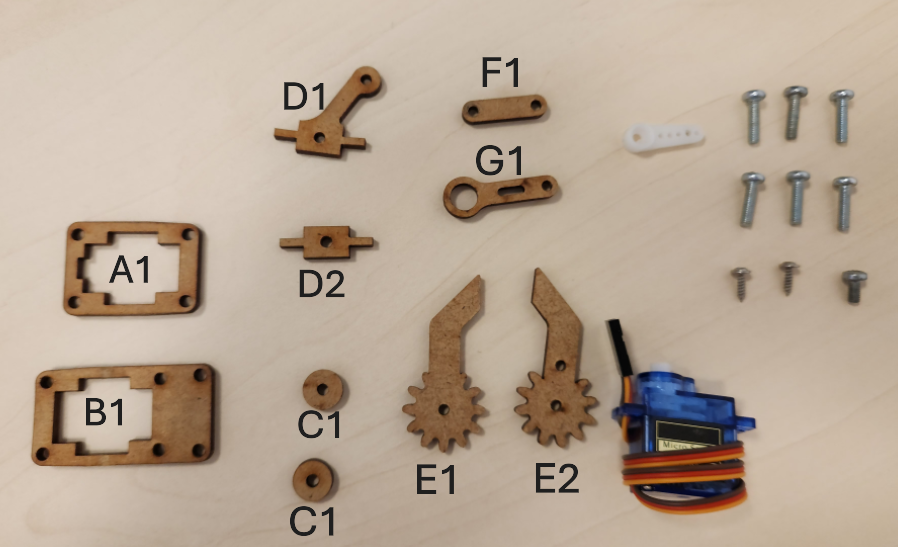
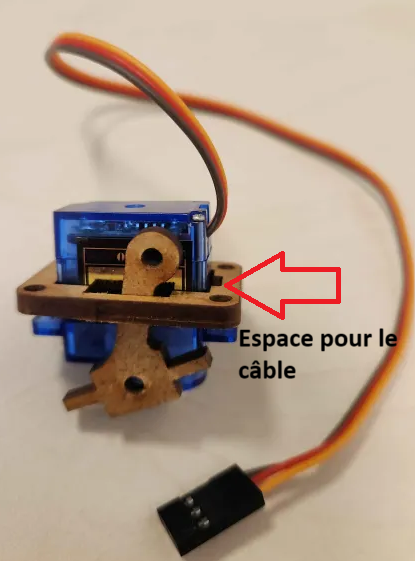
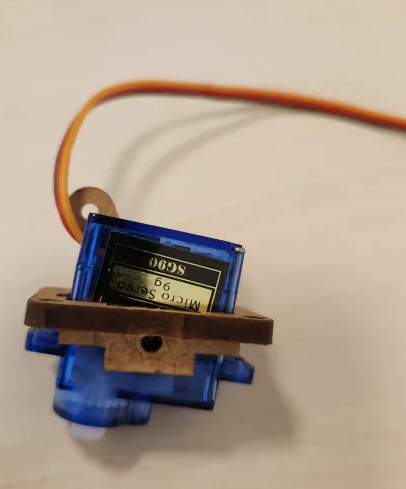
Etape 1 :
Placer votre Servomoteur dans A1, bien faire attention
à ce que le câble soit placé là où se trouve le petit espace Etape 2 :
de l'encoche puis placé D1 dans l'encoche sur le coté droit. Placer de la même façon la pièce D2 de l'autre coté.
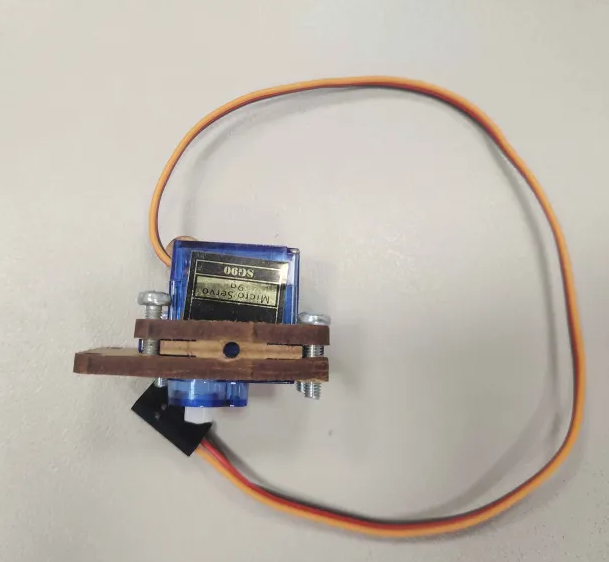
Etape 3 :
Attacher la pièce B1 en plaçant la partie la plus Etape 4 :
longue vers la sortie du fil. Fixer les pièces E1 et E2.
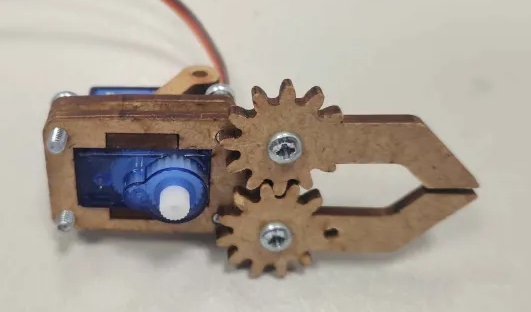
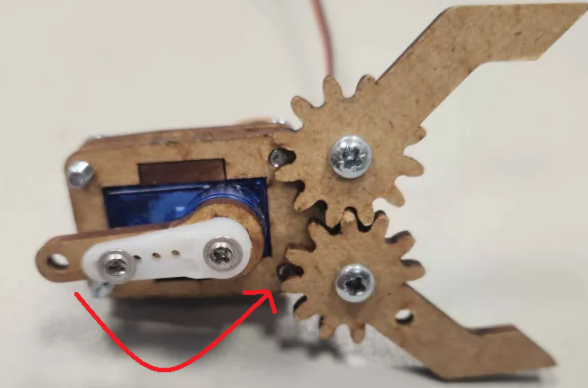
Etape 5 :
Mettre la demi hélice sur G1 et la fixer sur le servomoteur ; Etape 6 :
La butée du servomoteur doit être à l'arrière de la pince Mettre les dernières pièces (C1, F1) comme sur
mais faire en sorte qu'il tourne vers E2. l'image ci-dessous. Et la pince est finie.

Montage de la Base :
Matériel :
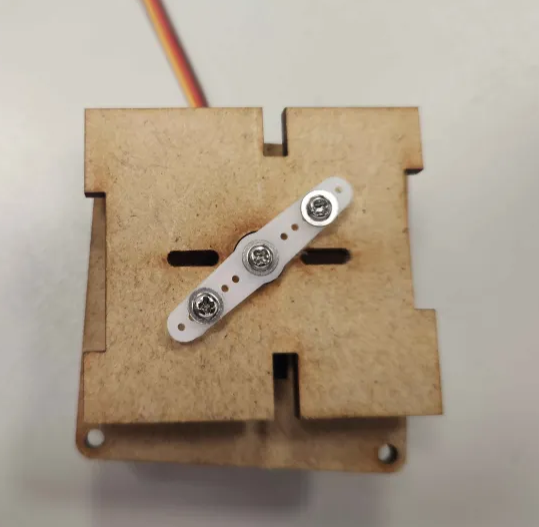
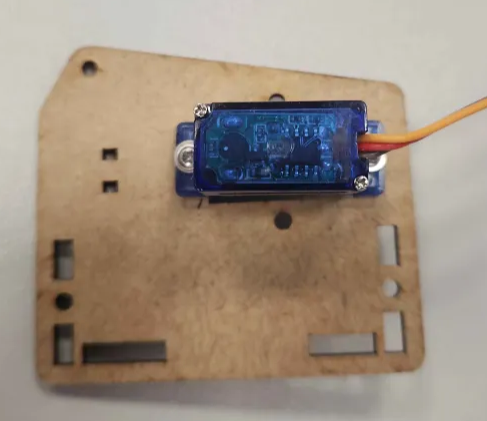
Etape 1 : Etape 2 :
Mettre un servomoteur moteur dans A2 Fixer l'hélice du servomoteur sur F2.
et fixer la pièce sur E3.
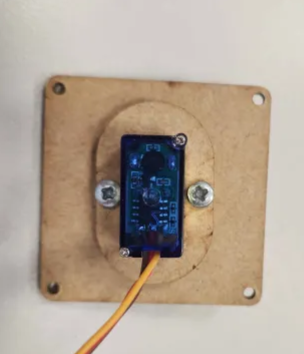
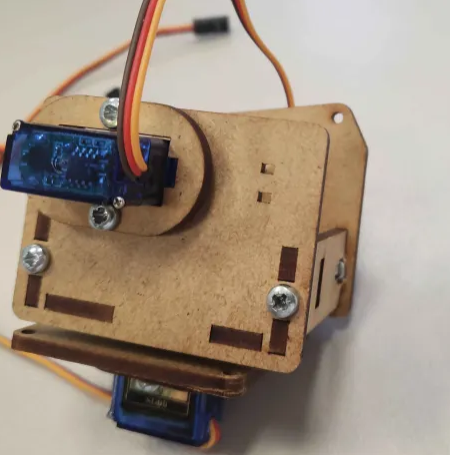
Etape 3 : Etape 4 :
Fixer un servomoteur sur B2 comme sur l'image Mettre un servomoteur dans A3 et
ci-dessous. le fixer sur B3.

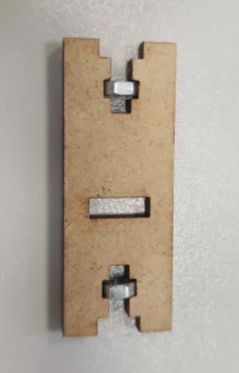
Etape 5 :
Mettre des boulons dans D3 et D4 comme
ci-dessous.
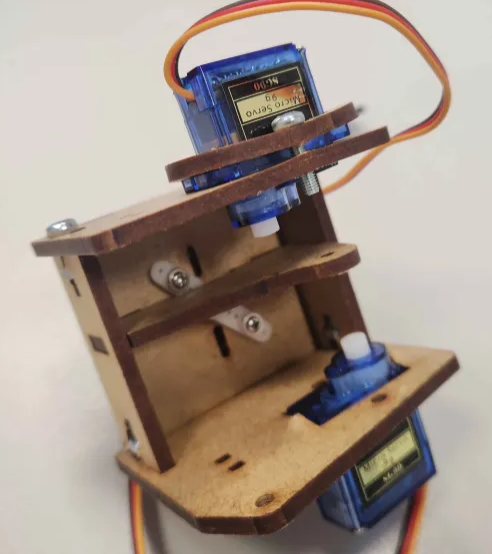
Etape 6 :
Assembler toutes ces pièces autour de F2 sans oublier de placer G2 au milieu.
No Comments