
Allumage, déblocage des roues et follow-me
| N° de la tâche |
Description de la tâche | Références/Photos |
| 1 |
Allumer le Sherpa en appuyant sur le bouton Power.
|
|
| 2 |
Attendre quelque dizaines de secondes afin que le sherpa s’allume correctement |
|
| 3 |
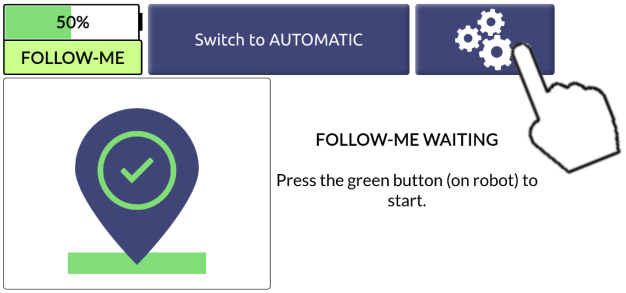
Lorsque le sherpa a fini de se lancer une image apparaît sur l’écran. Attendre quelques dizaines de secondes ou appuyer sur actualiser et l’image ci-contre apparaît. |
|
| 4 |
Pour éteindre le Sherpa, appuyer sur le bouton Power |
|



Mode Déblocage des roues
Après le démarrage du robot, on peut soit passer en mode Follow-Me, soit pousser le robot après avoir débloqué les freins. C’est nécessaire quand les AMR sont parqués dans la salle de TP à l’IUT, pour les faire passer dans un espace restreint, les charger dans un camion …
- On clique sur les engrenages
- On clique sur Unlock Wheels
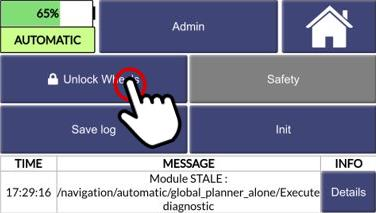
On peut maintenant pousser le robot.
Attention, ce n’est pas parce que le Sherpa est débloqué que les sécurités ne sont plus actives. Il faut pousser le robot en conservant le maximum de distance entre le robot et ses pieds, sinon le Lidar appliquera la sécurité et le robot bloquera les freins. On préfèrera donc pousser le robot que de le tirer vers soi.
- Pour verrouiller à nouveau les freins, il faut cliquer sur Lock Wheels
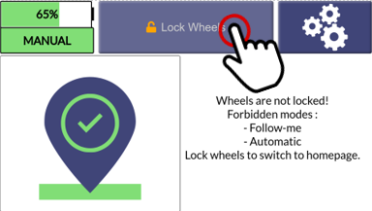
- Verrouiller les freins pour pouvoir déclencher les modes Follow-me ou autonome
Mode Follow-me
Le bouton Follow-me est le bouton vert à côté de l’écran d’affichage.
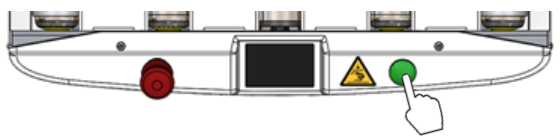
Pour accéder au mode Stand-by : il faut s’assurer que le robot ait été réarmé. Après un démarrage ou un arrêt d’urgence il est nécessaire d’appuyer sur le bouton de réarmement. Le bouton de réarmement est uniquement disponible sur le Sherpa B148 à l’IUT.
Le bouton réarmement (recycle) à coté du bouton Follow me sur le Sherpa B148.

No Comments