Skip to main content
Blocs de programmation avancée
Docking grâce à la localisation d'un Amer
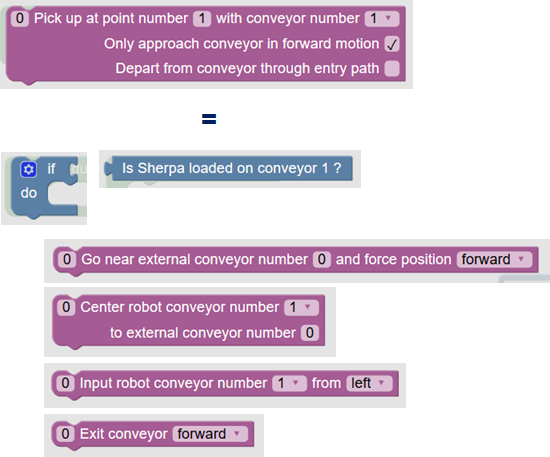
- Le block de docking permet au robot de se positionner avec une précision de l'ordre du centimètre par rapport à un convoyeur. Voici en quoi consiste un bloc de Pick Up
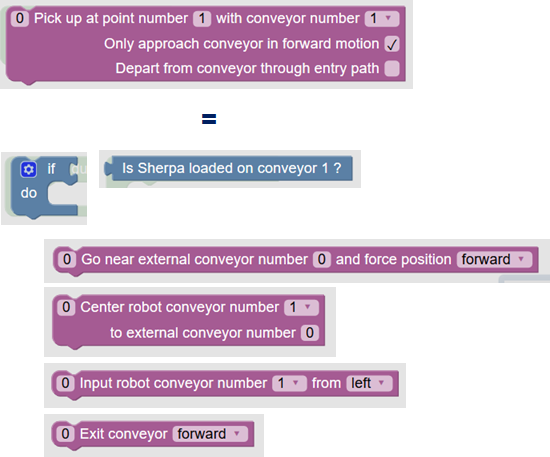
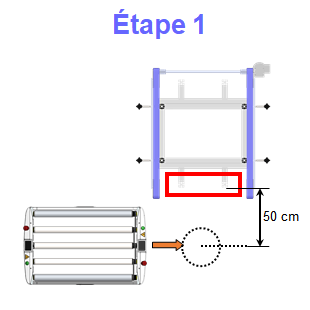
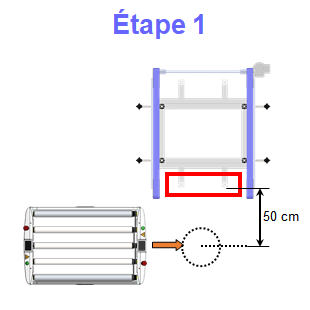
- Placer le point de mission à 50cm devant les barres verticales de l'Amer
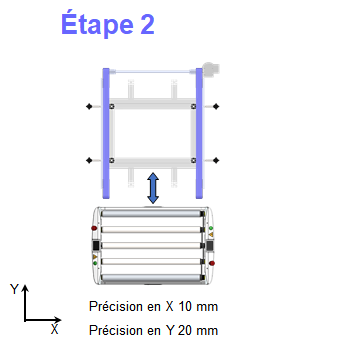
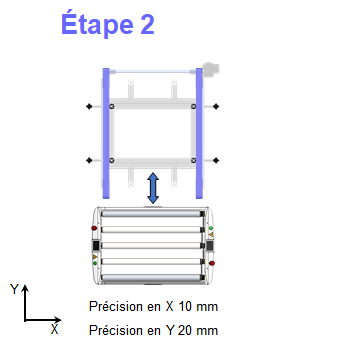
- Le robot effectue une trajectoire d'approche
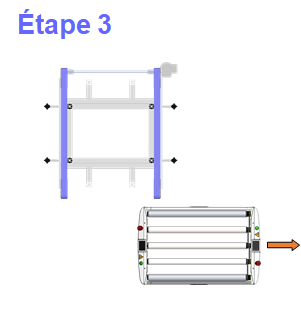
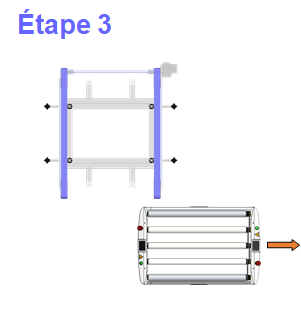
- Puis se docke au convoyeur avec une précision de l'ordre du centimètre
- Il repart soit en avant soit en arrière en fonction de l'option cochée

No Comments