
Etat de l'art Bras robot low-cost
Modèles commerciaux fermés
Niryo Ned 2
- 6DOF + Pince
https://niryo.com/fr/produit/bras-robotise-6-axes/
https://github.com/NiryoRobotics
DAGU Six-servo Robot Arm

- 5DOF Manipulateur + 1DOF Pince
- 6 servos
- 3x 13 kg.cm torque metal gear, 40.4 * 19.8 * 36 mm, 48g, 0.22s/60°
- 1x 3.2 kg.cm, 39.5 x20.0x35.5mm, 41g, 0.27s/60°
- 2x 2.3 kg.cm, 28 x14x29.8mm, 18g, 0.13/60°
- Carte de contrôle AREXX Intelligence Centre
https://seafile.unistra.fr/d/693101e6046d4819a3af/
https://arexx.com/product/robot-arm/
Modèles Open Source
https://github.com/AntoBrandi/Robotics-and-ROS-2-Learn-by-Doing-Manipulators
Trossen Robotics ALOHA
Stationary
https://docs.trossenrobotics.com/trossen_arm/main/specifications.html
https://docs.trossenrobotics.com/aloha_docs/2.0/specifications.html#aloha-stationary
https://docs.trossenrobotics.com/aloha_docs/2.0/operation/stationary.html
Solo
| Dimensions | 1019D x 1066H x 1225W mm |
| Leader Arms | WidowX 250 S - Aloha Version |
| Follower Arms | ViperX 300 S - Aloha Version |
| Camera | 2x Intel RealSense D405 |
| Chassis | Modular |
| Computer | Coming Soon |
| USB Hubs | Yes 1X |
https://docs.trossenrobotics.com/aloha_docs/2.0/specifications.html#aloha-solo
https://docs.trossenrobotics.com/aloha_docs/2.0/operation/solo.html
Trossen Robotics (Interbotix) X-Series Arms
https://docs.trossenrobotics.com/interbotix_xsarms_docs/specifications.html
Waveshare RoArm
- 5DOF + pince Waveshare
- https://github.com/waveshareteam/roarm_ws
- https://www.waveshare.com/product/roarm-m3.htm?sku=30444
ROBOTIS OMX
Follower:
- 5DOF + pince
- https://ai.robotis.com/omx/introduction_omx.html
Leader:
ROBOTIS Open Manipulator-P
ROBOTIS Open Manipulator-X
https://emanual.robotis.com/docs/en/platform/openmanipulator_x/specification/#specification
- 4 DOF Manipulateur + 1 DOF Pince
- 6x Dynamixel XM430-W350 https://emanual.robotis.com/docs/en/dxl/x/xm430-w350/
- Carte de contrôle Robotis OpenCR1.0 https://emanual.robotis.com/docs/en/parts/controller/opencr10/
SO-ARM100
https://github.com/TheRobotStudio/SO-ARM100
- 5 DOF Manipulateur + 1 DOF Pince
- 6 servos Feetech STS3215 https://www.feetechrc.com/en/2020-05-13_56655.html
- Waveshare Serial Bus Servo Driver Board https://www.waveshare.com/wiki/Bus_Servo_Adapter_(A)
- OU
- Feetech FE-URT-1 https://www.feetechrc.com/FE-URT1-C001.html
https://github.com/huggingface/lerobot/blob/main/examples/10_use_so100.md
https://github.com/JafarAbdi/ros2_so_arm100
pince compatible SO-ARM
Poppy Ergo JR
6DOF mais architecture semble optimisée pour faible le coût, qui n'a plus trop de sens avec le coût des servos Feetech. Une architecture 5DOF ou "typique industrielle" de type épaule poignet semble plus intéressante.
https://www.poppy-education.org/robots/poppy-ergo-jr/
Cartes de contrôle
OpenCR1.0
https://emanual.robotis.com/docs/en/parts/controller/opencr10/
- STM32F746ZGT6 / 32-bit ARM Cortex®-M7 with FPU (216MHz, 462DMIPS)
Reference Manual, Datasheet - Programmer : ARM Cortex 10pin JTAG/SWD connector
USB Device Firmware Upgrade (DFU)
Serial - Digital I/O
- 32 pins (L 14, R 18) *Arduino connectivity
- 5Pin OLLO x 4
- GPIO x 18 pins
- PWM x 6
- I2C x 1
- SPI x 1
- Communication Ports
- USB x 1 (Micro-B USB connector/USB 2.0/Host/Peripheral/OTG)
- TTL x 3 (B3B-EH-A / DYNAMIXEL)
- RS485 x 3 (B4B-EH-A / DYNAMIXEL)
- UART x 2 (20010WS-04)
- CAN x 1 (20010WS-04)
Waveshare Serial Bus Servo Driver Board
https://www.waveshare.com/wiki/Bus_Servo_Adapter_(A)
- Supports connecting to a host or MCU
- up to 253 ST/SC series serial bus servos
- RS485
- UART pour contrôle depuis Arduino, ESP32, STM32 (RX-RX, TX-TX)
- USB pour contrôle via Raspberry, Jetson ou PC
- 9~12.6V voltage input (the input voltage and the servo voltage must be matched)
Feetech FE-URT-1
https://www.feetechrc.com/FE-URT1-C001.html
AREXX Intelligence Centre
https://seafile.unistra.fr/d/693101e6046d4819a3af/
- atmega168 MCU
- RS232
- default baud rate is 115.2k
- Wifi wireless control reserve the ISP downloaded, you can download the MCU controller program using the STK500 ISP cable
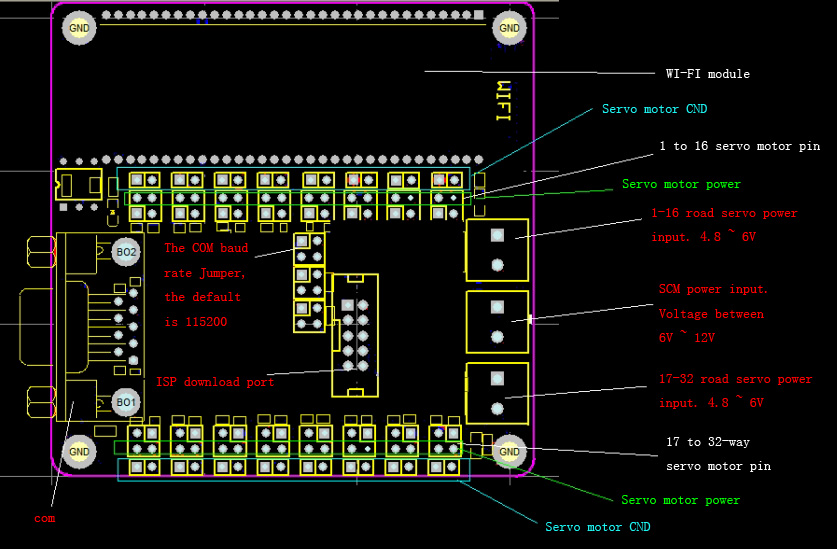
- dual - Power Supply
- 6 ~ 12 V SCM power
- 4.8 ~ 6 V, 1.2A servo motor power [servo motor power supply Road 1-16 respectively, a 17-32 road supply port])
Servomoteurs
Dynamixel XM430-W350
https://emanual.robotis.com/docs/en/dxl/x/xm430-w350/
- 4.1 [N.m] (at 12.0 [V], 2.3 [A])
- 46 [rev/min] (at 12.0 [V])
- 10.0 ~ 14.8 [V]
- Operating Modes
- Current Control Mode
- Velocity Control Mode
- Position Control Mode (0 ~ 360 [°])
- Extended Position Control Mode (Multi-turn)
- Current-based Position Control Mode
- PWM Control Mode (Voltage Control Mode)
- baud rate 9,600 [bps] ~ 4.5 [Mbps]
- TTL Half Duplex Asynchronous Serial Communication with 8bit, 1stop, No Parity
- RS485 Asynchronous Serial Communication with 8bit, 1stop, No Parity
Feetech STS3215
https://www.feetechrc.com/en/2020-05-13_56655.html
No Comments