Skip to main content
Innovation IUT Haguenau
View All
Search
Shelves
Books
Sign up
Log in
Info
Content
Books
Robotique Open Source
2 - ROS2 - Robotique m...
Calibration de la caméra
Calibration de la caméra
https://docs.nav2.org/tutorials/docs/camera_calibration.html
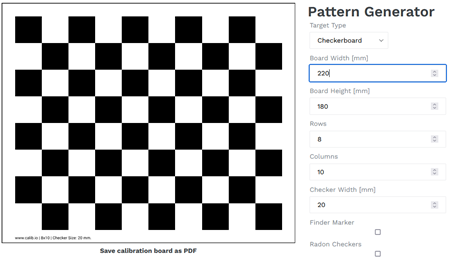
Générer un damier de calibration : 8 x 10 carrés de 20m
avec
https://calib.io/pages/camera-calibration-pattern-generator
Ce sont les sommets intérieurs des carrés qui sont utilisés, donc 7x9 sommets
Ressources
Noeud ROS2 pour Raspberry Cam
https://github.com/christianrauch/camera_ros
https://index.ros.org/p/camera_ros/
https://medium.com/swlh/raspberry-pi-ros-2-camera-eef8f8b94304
Previous
TurtleBot3 - Piloter le Robot
Next
Suivi de ligne ROS2 Humble
No Comments
Back to top

No Comments