
Qu'est ce qu'un capteur à ultrasons ?
 HC-SR04 est un capteur à ultrasons qui est principalement utilisé pour la mesure de distance. En émettant des ondes ultrasonores et en mesurant le temps pris par ces ondes pour rebondir après avoir frappé un objet, le HC-SR04 peut déterminer avec précision la distance à laquelle cet objet se trouve. De par son coût abordable et sa facilité d’intégration avec des plateformes telles qu’Arduino, le HC-SR04 est devenu un choix prisé parmi les amateurs de bricolage et les professionnels.
HC-SR04 est un capteur à ultrasons qui est principalement utilisé pour la mesure de distance. En émettant des ondes ultrasonores et en mesurant le temps pris par ces ondes pour rebondir après avoir frappé un objet, le HC-SR04 peut déterminer avec précision la distance à laquelle cet objet se trouve. De par son coût abordable et sa facilité d’intégration avec des plateformes telles qu’Arduino, le HC-SR04 est devenu un choix prisé parmi les amateurs de bricolage et les professionnels.
Principe de fonctionnement
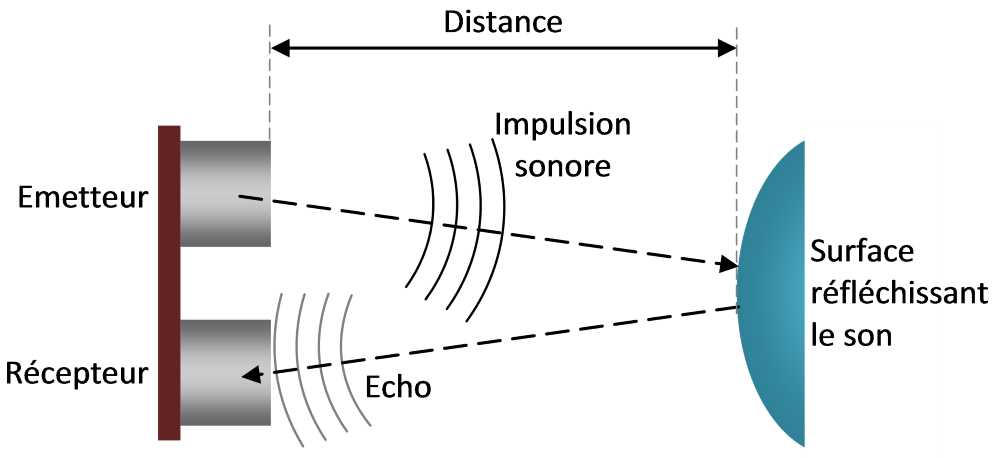
Le fonctionnement d'un capteur à ultrason comme le HC-SR04 est assez simple. Il comporte deux éléments principaux : un émetteur ultrasonore et un récepteur ultrasonore. Voici les étapes clés du fonctionnement du capteur :
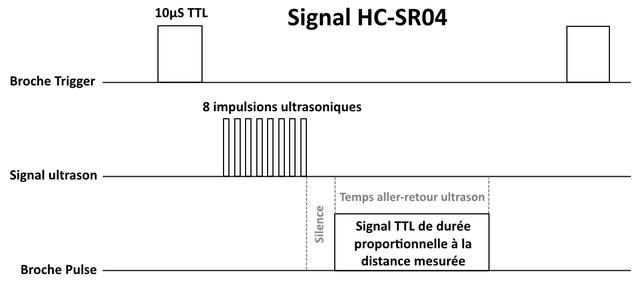
- Lorsque le capteur est alimenté, l’émetteur envoie une série de 8 impulsions ultrasoniques de 10µs à une fréquence spécifique (généralement de 40 kHz).
- Lorsque une impulsion sonore atteint un objet, elle rebondit et est renvoyée vers le récepteur ultrasonore comme un écho.
- Le capteur mesure le temps entre le moment où l’impulsion a été émise et celui où l’écho a été reçu.
- En utilisant la vitesse connue du son dans l’air (environ 343 m/s ou 34,3 cm/µs) et la durée de l’écho mesurée, le capteur calcule la distance jusqu’à l’objet en utilisant la formule : distance = (durée de l’écho / 2) * vitesse du son.
- Le résultat est ensuite converti en une distance numérique et envoyé au Arduino via une sortie numérique
Description du capteur HC-SR04

| Broche | Description |
|---|---|
| VCC | Il s’agit de la broche d’alimentation. Elle nécessite généralement une entrée de 5V Courant Continu, la rendant directement compatible avec des cartes comme Arduino. |
| Trig (Déclenchement) | Cette broche est utilisée pour initier le capteur à émettre une onde ultrasonore. En envoyant une impulsion haute d’au moins 10µs à cette broche, le HC-SR04 émettra une série de 8 impulsions d'ultrasons à 40 kHz. |
| Echo | Une fois l’onde ultrasonore émise et qu’elle rebondit après avoir frappé un objet, la broche Echo fournit une impulsion de sortie. La largeur de cette impulsion est proportionnelle à la distance de l’objet par rapport au capteur. En mesurant la durée de cette impulsion, Arduino peut déterminer la distance jusqu’à l’objet. |
| GND (Masse) | Cette broche est connectée à la masse du circuit. |
Le câblage :
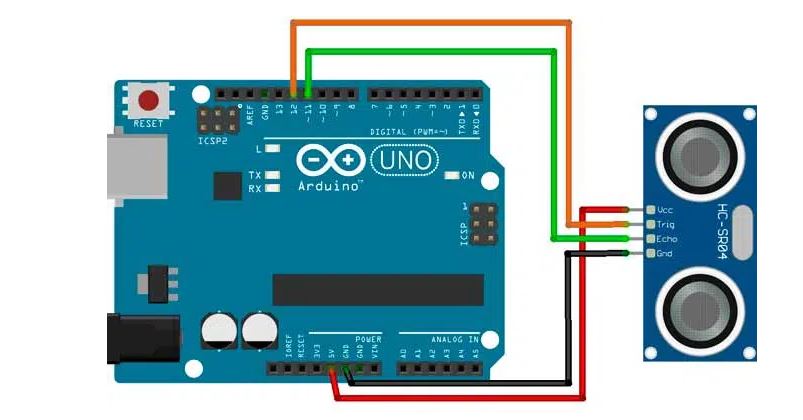
Pour connecter le capteur HC-SR04 à une carte Arduino, suivez ces étapes :
- Connectez la broche VCC du HC-SR04 à la broche 5V sur la carte arduino uno. Cela assure que le capteur reçoive la puissance nécessaire pour son fonctionnement.
- Reliez la broche GND (Masse) du HC-SR04 à l’une des broches de masse (GND) d’Arduino. Cela établit une masse électrique commune entre le capteur et arduino.
- Connectez la broche Trig du HC-SR04 à une broche numérique d’Arduino, par exemple, la broche D12. Cette broche est responsable de l’envoi d’un signal pour déclencher le capteur afin qu’il émette les ondes ultrasonores.
- Reliez la broche Echo du HC-SR04 à une autre numérique sur l’Arduino, comme la broche D11. Cette broche détecte l’onde ultrasonore écho après réflexion sur un objet.
Programmer un HC-SR04
!!Attention pour Mblock ne pas oublier d'installer l'extension en tapant "ultrasons" dans la barre de recherche.
Description des nouveaux blocs à utiliser :
- Ce bloc permet de d'indiquer à l'Arduino quelles broches l'on va utiliser pour le 'Trig' et pour l' 'Echo'

- Ce bloc permet de calculer à quel distance en cm l'on est d'un potentiel obstacle.

- Ce bloc contient la valeur calculer dans le bloc précédent

Attention à bien indiquer à coté de 'Trig' et de 'Echo' les broches sur lesquels vous êtes branchés. Si votre code ne marche pas vérifier bien cela d'abord.
- Ce bloc permet d'écrire dans le port série

C’est quoi un port série ?
Le port série, c’est un peu comme une voie de communication entre ton ordinateur et le robot.
Imagine que l’ordinateur et le robot discutent.
Le port série, c’est le fil (ou le tunnel) par lequel les messages passent, un caractère à la fois, dans un seul sens à la fois.En langage simple :
Quand tu programmes le robot avec mBlock, tu envoies le programme par le port série.
Tu peux aussi recevoir des messages venant du robot, comme :
la distance détectée par un capteur,
des valeurs de température,
ou tout ce que tu lui demandes de t’envoyer.
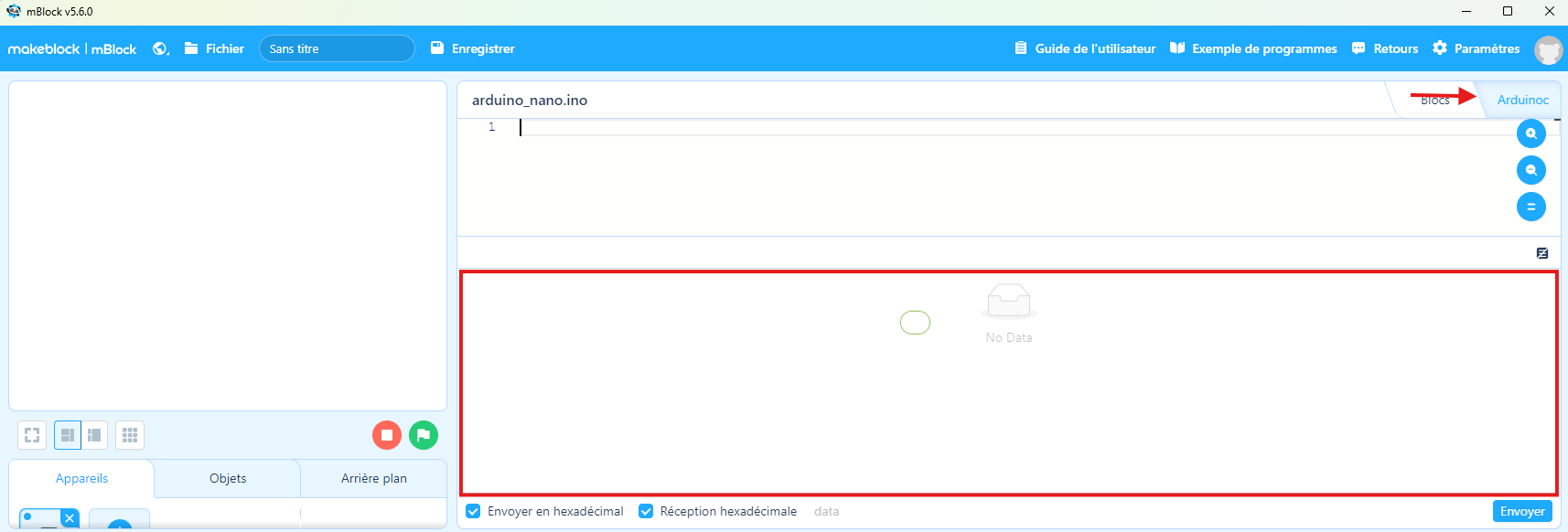
Où ce trouve le port série ?
Allez dans 'Arduinoc', et il se trouve dans l'encadrée rouge
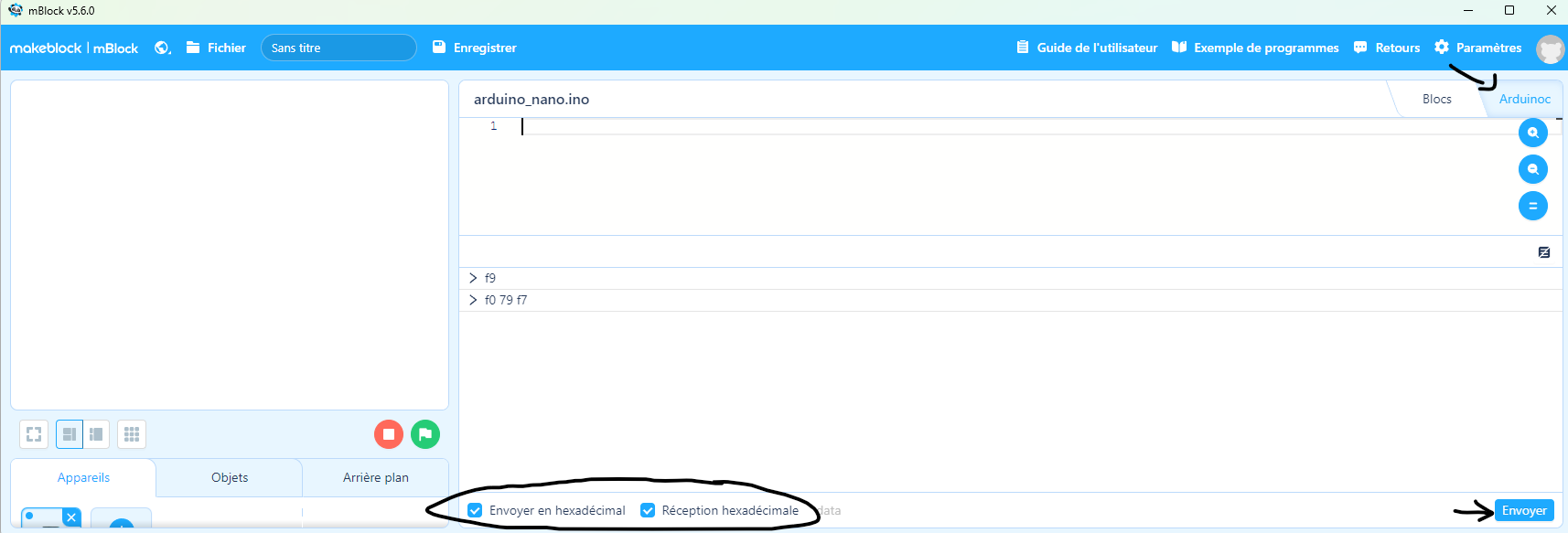
Avant de téléverser votre code dans l'Arduino nano, accéder au port série et décocher ses cases en allant dans 'Arduinoc' puis cliquer sur envoyer :
Chaque exercice est à faire valider par un animateur
Exercice : Afficher les valeurs la distance de l'ultrason dans le port série
Ce code permet de mesurer une distance et de l'afficher sur le moniteur série du logiciel Arduino IDE.
// définition des numéros de broches
const int trigPin = 12;
const int echoPin = 11; // définition des variables
long duration;
int distance;
void setup()
{
pinMode(trigPin, OUTPUT); // Définit le trigPin comme sortie
pinMode(echoPin, INPUT); // Définit le echoPin comme entrée
Serial.begin(9600); // Commence la communication série
}
void loop()
{
// Efface le trigPin
digitalWrite(trigPin, LOW);
delayMicroseconds(2); // Met le trigPin à l'état HIGH pendant 10 microsecondes
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW); // Lit le echoPin, renvoie le temps de trajet de l'onde sonore en microsecondes
duration = pulseIn(echoPin, HIGH); // Calcul de la distance
distance = duration * 0.034 / 2; // La vitesse du son est d'environ 0.034 cm par microseconde
Serial.print(“Distance: “); // Affiche la distance sur le moniteur série
Serial.println(distance);
delay(2000);
}
Source :
https://www.moussasoft.com/hc-sr04-capteur-ultrason-avec-arduino
No Comments