
Phase 2 - Assemblage des pièces
Phase 1 - Assemblage des pièces
Objectifs pédagogiques
- Découverte de la mécanique et de la robotique : Initier les élèves à la construction d’un système mécanique articulé.
- Travail en équipe : Encourager la collaboration entre les élèves pour atteindre un objectif commun en temps limité.
- Précision et méthode : Apprendre à assembler un objet technique en suivant des étapes précises, avec soin et rigueur.
- Pratique des compétences manuelles et techniques : Familiariser les élèves avec l’utilisation d’outils de montage et la lecture d’un schéma d’assemblage.
Compétences techniques visées
- Assemblage mécanique : Être capable d'assembler les pièces du bras robot (structure, axes, moteurs, etc.) de manière précise et dans un ordre logique.
- Utilisation d’outils : Apprendre à manier correctement les outils nécessaires (tournevis, clé Allen, etc.).
- Lecture d’un schéma technique : Savoir interpréter un plan d'assemblage et identifier les différentes pièces et leur emplacement.
- Montage des éléments motorisés : Installer correctement les moteurs et éléments mécaniques du bras robot.
Savoir être (compétences comportementales)
- Travail en équipe : Répartir les tâches de manière équitable et efficace au sein du groupe.
- Rigueur et précision : Être attentif aux détails lors de l’assemblage pour éviter les erreurs.
- Gestion du temps : Apprendre à respecter le temps imparti pour finaliser le projet.
- Adaptabilité : Savoir réagir en cas de difficulté ou de problème technique, et adapter sa méthode de travail.
Compétences transversales
- Collaboration et communication : Travailler efficacement en groupe, en partageant les responsabilités et en communiquant clairement.
- Organisation : Organiser les étapes de l'assemblage de manière logique et structurée.
- Résolution de problèmes : Trouver des solutions rapidement en cas de dysfonctionnements ou de blocages lors de l'assemblage.
- Apprentissage pratique : Développer des compétences en manipulant des objets techniques et en résolvant des problèmes concrets.
Montage du bras robotique :
FICHE DE RÉFÉRENCE RAPIDE DES PARTIES STRUCTURELLES :
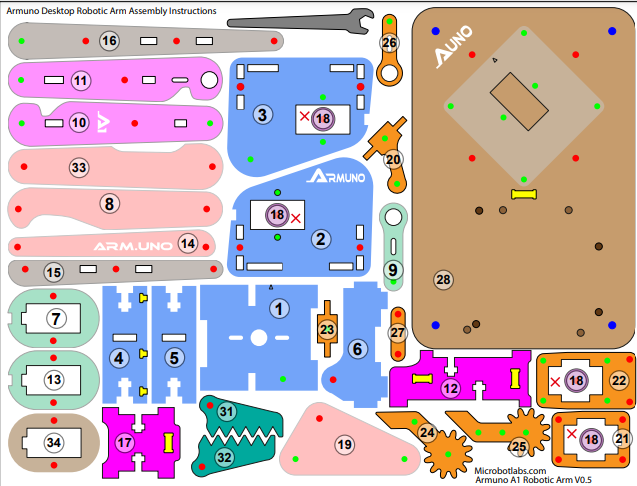
- 12 pièces - Écrou M3
- 32 pièce - Vis M3 x 12
- 4 pièces - Vis M3 x 20
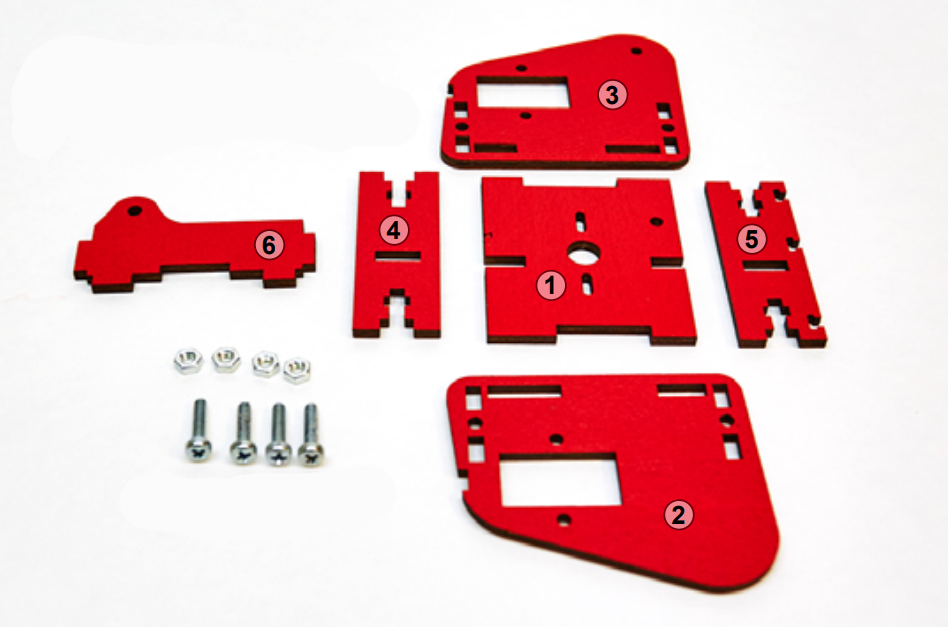
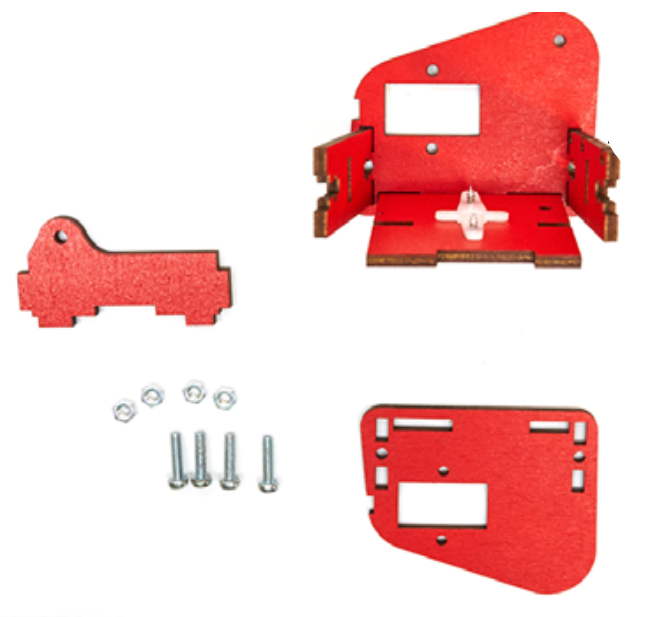
Montage de la Base :
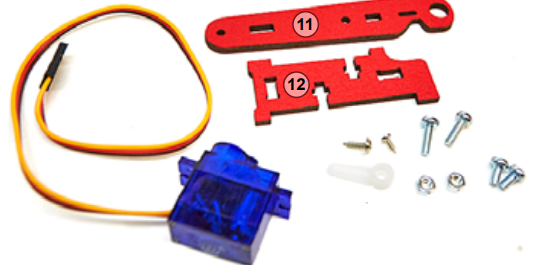
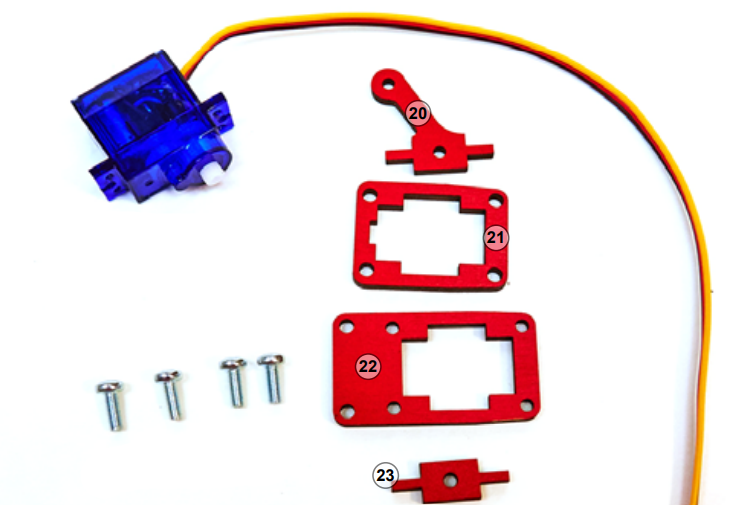
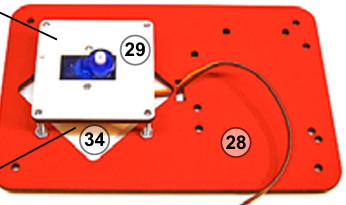
Matériel nécessaire :
Etape 1 :

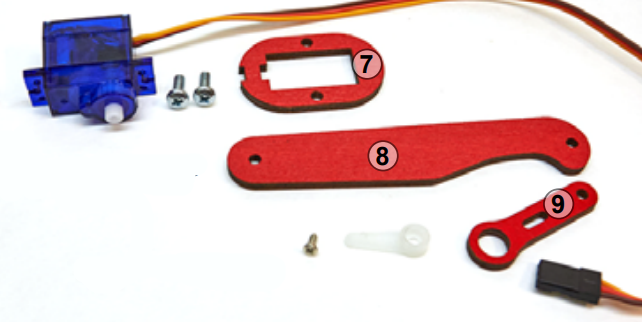
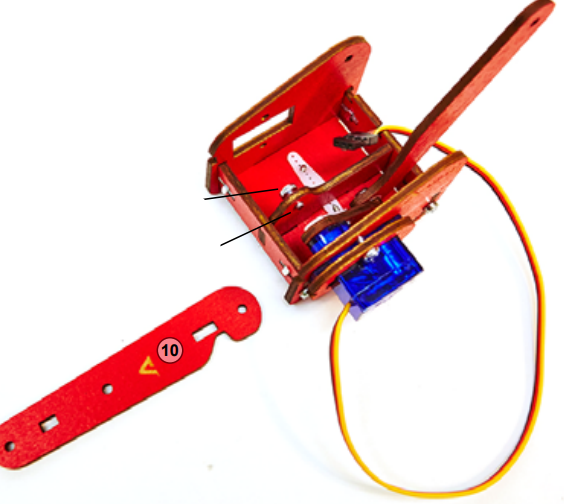
Fixez d'abord un palonnier double face à l'aide des petites vis fournies avec les servomoteurs.
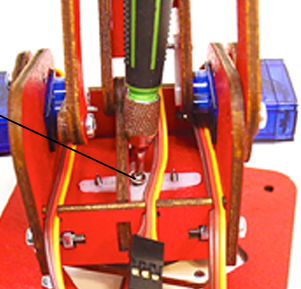
Faites attention à l'orientation des pièces. Notez la petite flèche gravée sur la pièce, qui pointe vers l'avant du bras. Positionnez le palonnier comme indiqué, puis retournez les deux pièces et fixez les deux petites vis.
Positionnez toujours les vis à mi-distance ou plus loin du moyeu central du palonnier. Cela permet d'éviter une éventuelle interférence entre les têtes des vis et certains boîtiers de servomoteurs.
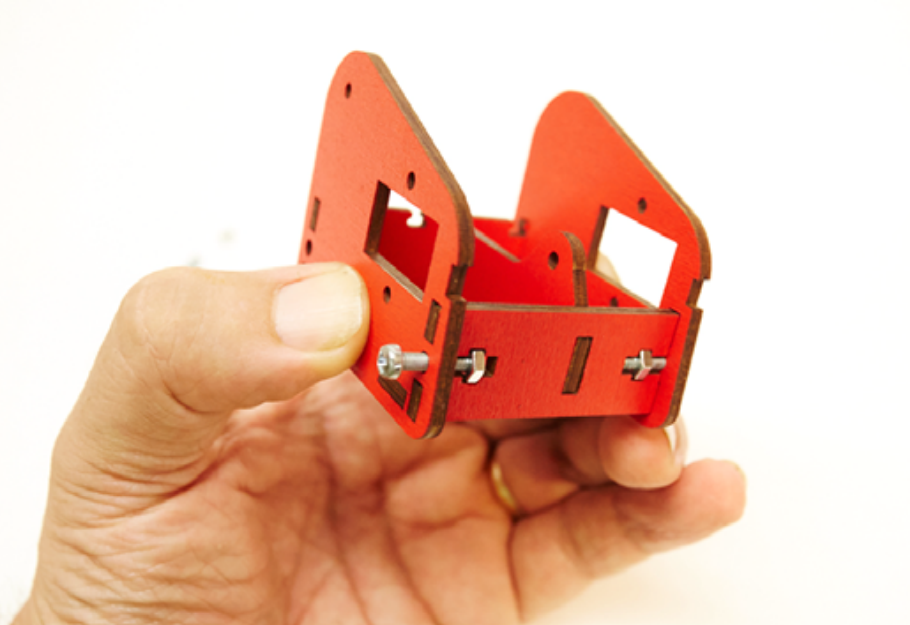
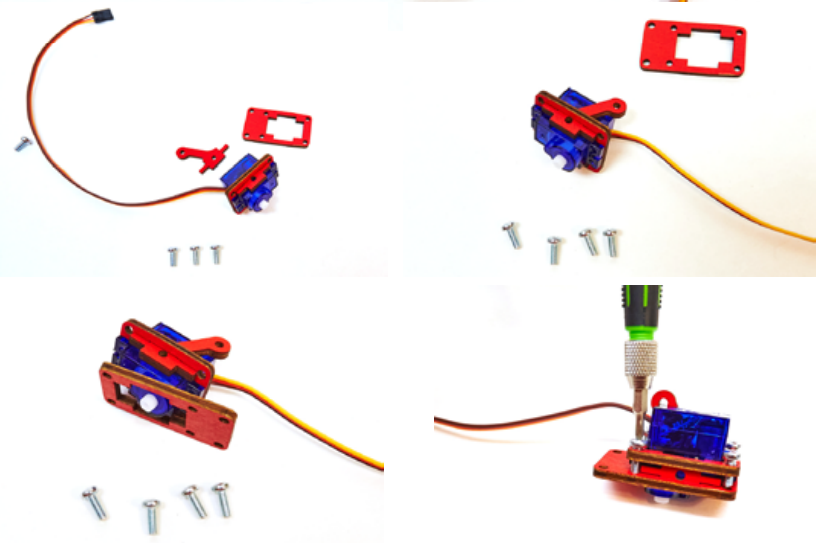
Etape 2 :
SI LES ENCOCHES NE S'ALIGNENT PAS
VÉRIFIEZ BIEN QUE LA PIÈCE EST ORIENTÉE COMME INDIQUÉ.
NE FIXEZ PAS ENCORE LES ÉCROUS ET LES BOULONS.
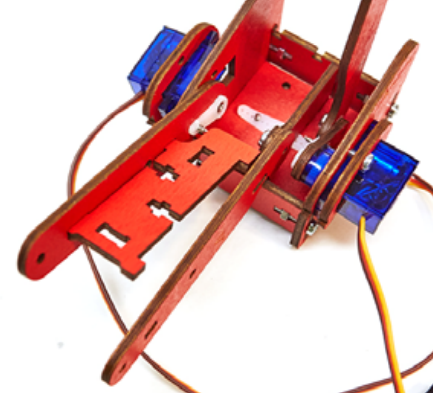
Etape 3 :

INSTALLEZ LA BARRE CENTRALE COMME INDIQUÉ.
AVEC LE DERNIER CÔTÉ INSTALLÉ, IL NE RESTE PLUS QU'À FIXER LES BOULONS ET LES ÉCROUS.

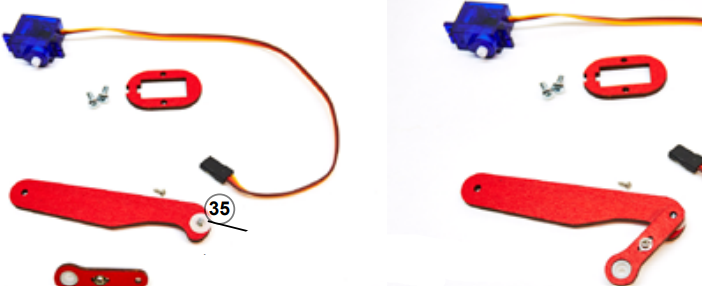
Pour le coté Gauche :

Placez le cercle du palonnier dans le trou correspondant du servomoteur.
Retournez les deux pièces et fixez à nouveau la vis du palonnier vers l'extrémité la plus éloignée afin d'éviter d'éventuels problèmes de dégagement avec le boîtier du servomoteur.
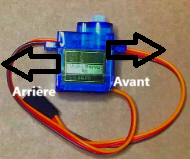
Pour la suite quelques petite précisions, il faut bien faire la différence entre l'avant du servomoteur et l'arrière.
Pour fixer le palonnier sur le servomoteur il faut d'abord donner ce code via l'Arduino nano pour connaître sa position 0.
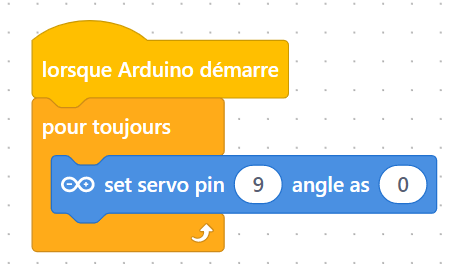
Arrivé à la position 0 mettez le palonnier à l'horizontal vers l'avant du servomoteur.


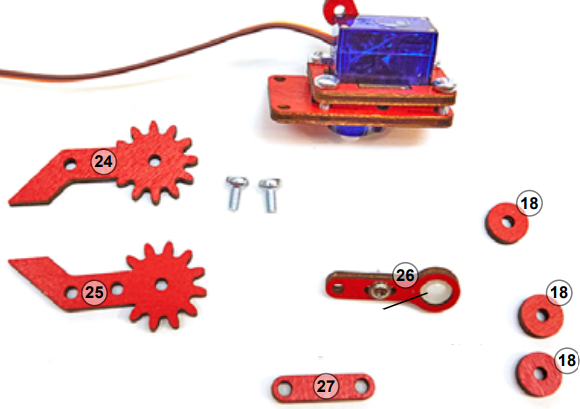
Coté droit :
Matériel :
Pour le servomoteur du coté droit, dans un premier temps le mettre à la position 0, puis placer le palonnier à l'horizontal vers l'arrière.

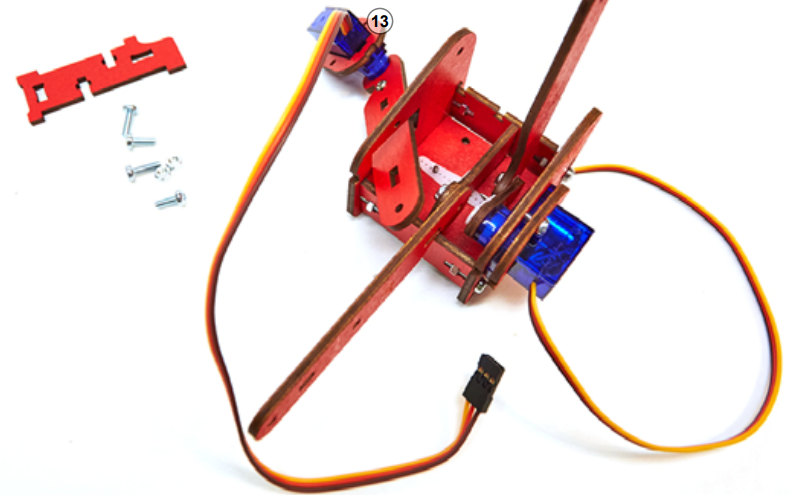
ASSEMBLAGE DU SERVOMOTEUR DU CÔTÉ DROIT AVEC LA BASE :
Matériel de l'assemblage de la poutre du lien supérieur :

Fixez la renfort de la poutre du lien supérieur comme indiqué ci dessous :

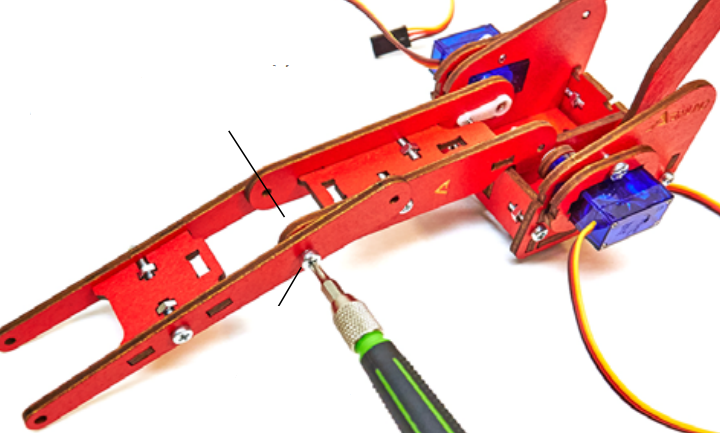

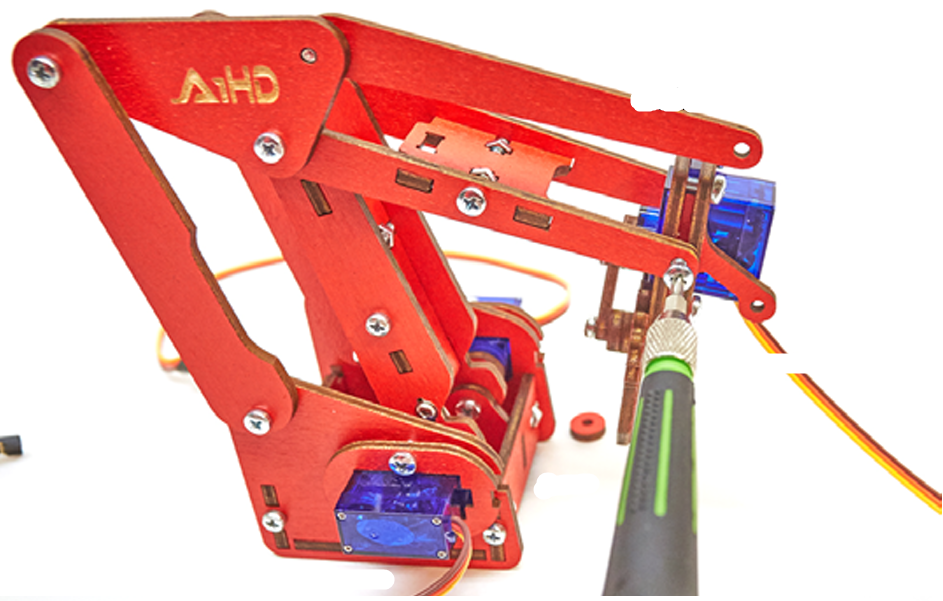
L'assemblage principal du bras est maintenant terminé et prêt à recevoir l'assemblage de la pince.
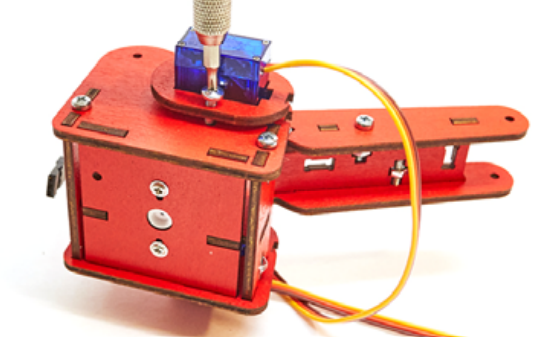
Assemblage du servomoteur de la pince :
Matériel nécessaire :
Assemblage du reste de la pince :
Matériel nécessaire :

Mettre le servomoteur de la pince à la position 0 et mettre le palonnier à l'horizontal vers l'arrière.

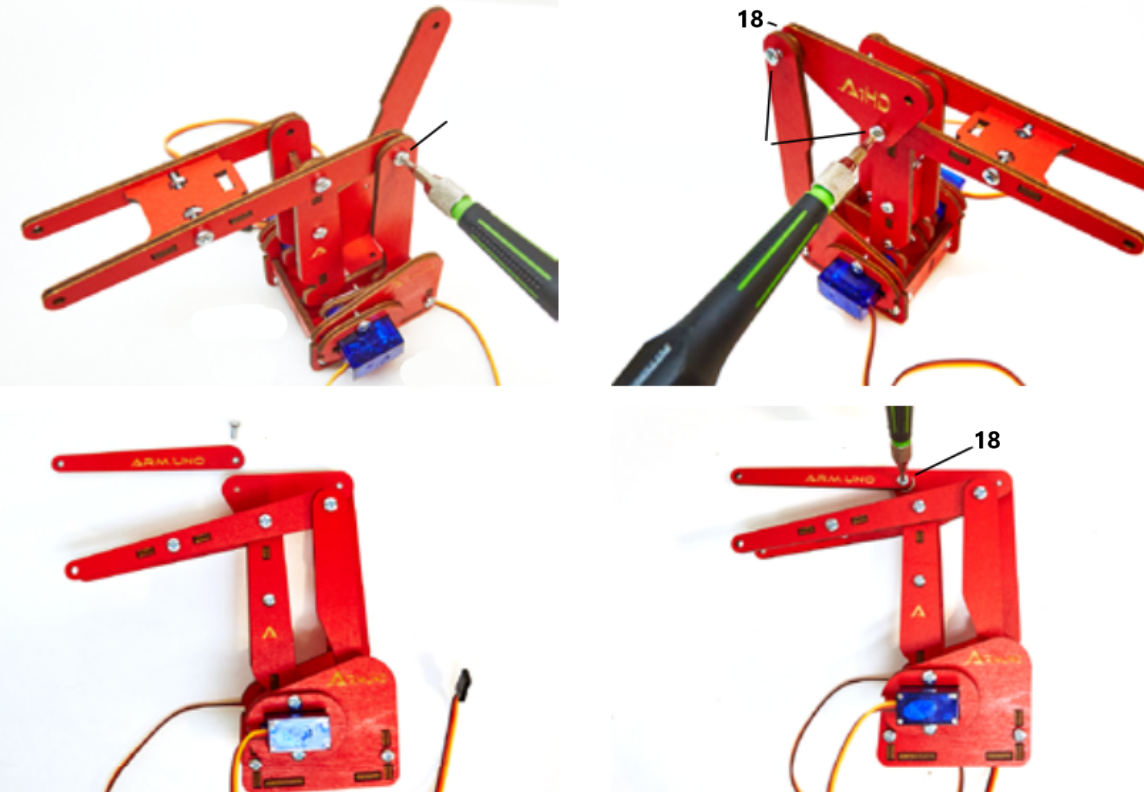
Montage de la pince sur le bras :

Fixer la pince au lien supérieur gauche du bras avec une vis de 3 mm x 10 mm. ne pas trop serrer, car les vis pourraient comprimer le boîtier du moteur servo, ce qui entraînerait le blocage du train d'engrenages.
Fixer le lien parallèle à la pince avec un écrou et une vis de 3 mm x 10 mm. Ajuster le serrage pour permettre un mouvement libre.
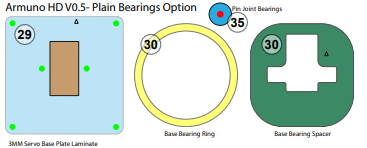
assemblage de la base et du roulement :
Quand vous fixer le servomoteur mettez le à la position 90 puis vous avez juste à mettre votre bras robotique vers l'arrière à l'inverse de la dernière image.
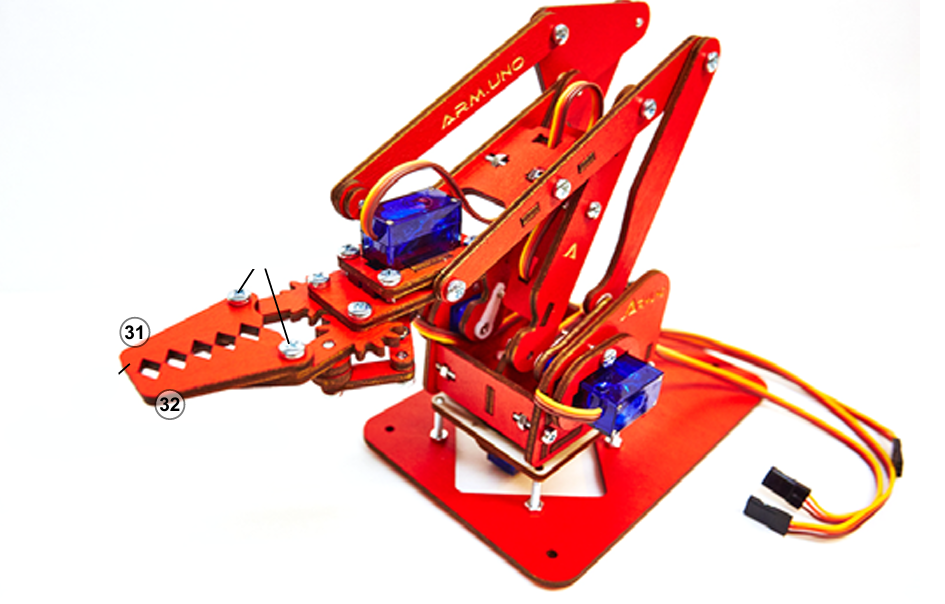
Vous pouvez rajouter les extensions de la pince avec les pièces 31 et 32 comme ci-dessus.
Et voilà le montage de votre bras robotique est fini!!!
No Comments